|
|

|
| |
Motor Tech Corner of
TRCY
Motor Corner has tutorials
written by fellow member KE6GHS.
Motor Basics
Part III
By Gary Croll
More are soon to
follow, older tutorials may be placed in zip files for downloading.
Gary Croll
Riverside County Chapter of the Robotics Society of
Southern California (RSSC)
|
| |
 |
The simplest
circuit for remotely controlling a DC motor, is a relay for a basic on / off function. The
following circuit expands on that design with 2 relays for forward and reverse. The
circuit at left can be driven by most TTL level signals. Q1 and Q2 are not critical and
can be almost any NPN transistor including 2N2222 or ECG123A.
If the circuit is to be driven by CMOS, or, if the relays used have low coil
resistance, Q1 and Q2 should be replaced by NPN darlingtons such as MPSA13's or ECG46's.
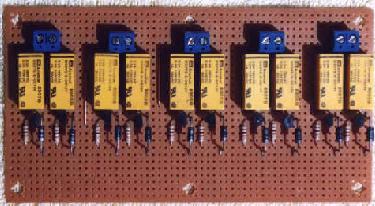
The photo below shows a typical layout with 5 sets of the circuit seen at left.
|
Relay circuit board for full control of 5 motors or 10 circuits.
 |
The next step
in the evolutionary development of motor control is the transistor. The use of a
transistor as a "low side" switch is the most common configuration. This means
that the positive source goes directly to one side of the motor, while the "low
side" of the motor goes through a transistor to ground.
|
You can use either a bipolar or a MOSFET transistor in this
capacity. If your current demand is low and your design can tolerate the voltage drop
across the junction, then a bipolar transistor will work for you. Generally a bipolar
power transistor such as the 2N3055 will be much cheaper and easier to find than an
equivalently rated MOSFET.
The disadvantages of bipolar include a high junction resistance in the "on
state" which shows up as voltage drop and heat. A bipolar also has to be properly
biased to prevent "thermal runaway" in which case the transistor destroys
itself.
A MOSFET transistor generally costs more than a bipolar of the same current rating, but
offers several distinct advantages. The "on state" junction resistance of a
MOSFET is quite low. It's not unusual to find a power MOSFET with an "on"
resistance of .01 ohms. This means there will be negligible drop across the device and the
transistor will run cool even when switching large loads. Also, they do not require
biasing like a bipolar and are not subject to "thermal runaway". When operated
within their design parameters, they are pretty much trouble free.
The disadvantages of the MOSFET, are their higher cost and their handling precautions.
Because they are a MOS device, they can easily be damaged by static electricity, although
most devices today have built in protection.
 |
This drawing
shows a simple "low side" switch employing a power MOSFET transistor. The device
shown is from SGS Thomson. It comes in a TO-220 style case and is rated 50 volts at 12
amps with an "on" resistance of 0.1 ohms. Because these are high impedance
devices, the 10K resistor is used to keep the gate turned off except when there is a valid
high input. If you need more control of your motor than what a simple
relay or transistor can offer, then the next step is speed control. This can be
accomplished in many ways but the most widely used in hobby robots is Pulse Width
Modulation, (PWM). |
 |
This chart
comes from the book," How To Design & Build Your Own Custom Robot" by David
L. Heiserman. What it shows is how an average DC value can be changed by varying the duty
cycle of a pulse that is creating it. For instance, suppose we have a pulse generator with
an amplitude of 5 volts. If the duty cycle of that pulse is 100%, then the output would
remain high the entire time and the effective output voltage would be 5 volts. If,
however, we alter the duty cycle, or "on time" of the pulse to 50%, then the
effective voltage is 2.5 volts. There are probably as many different ways
to design a PWM circuit as there are people building robots. The following are a couple
common examples I have found that work quite well. |
 |
This circuit
seems to pop up everywhere and for good reason, it's cheap, easy, and it works.
|
 |
This
circuit using an NE556 timer chip is also from David L. Heiserman's book. With R1 set at
100K, the fixed frequency is 100 hz. With larger motors, this frequency may not be the
most efficient, and in fact, the buzzing noise from the motors may be very annoying.
Lowering the value of R1 will raise the operating frequency and may improve the
performance. An added note to this schematics,
there is only one 556 chip used in this circuit. For easy of layout this chip is
shown in two sections. |
If you want full solid state control of your DC
motors, then an H-Bridge circuit is the way to go. There are a number of H-Bridge chips on
the market to choose from. With voltage ratings up to 80 volts, and current ratings up to
10 amps, there is almost certainly a chip available to meet your specific needs.
There are several configurations of H-Bridges available depending on whether you need
bipolar or MOSFET technology. They are also available with or without the control logic.
An example of a bipolar bridge without control logic is the ZHB6718CT-ND by Zetex Inc. (www.zetex.com). This little chip is rated 20 volts at 2.5
amps and is available in an 8-pin surface mount package as well as a minidip. Single
quanity price from DigiKey, (www.digikey.com), is
$5.01
Pictured below are some of the more popular H-Bridges used by hobbyists.
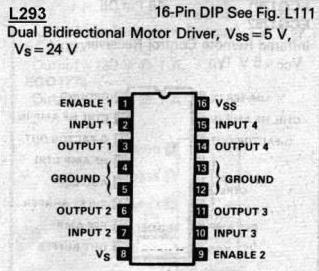 |
The L293 is a
dual bipolar H-Bridge with control logic.
Supply voltage is 44 volts maximum with a 600ma current rating per channel.
The L293DNE is a diode clamped version while the L293B is rated 1 amp per channel. Prices
range from $6.59 at MCM Electronics to $1.48 at NetBuy.
At the end of the article is a rather unusual circuit using the L293 to provide full motor
control using only one pot. |
Drawings from Sylvania's ECG Semiconductor Replacement Handbook.
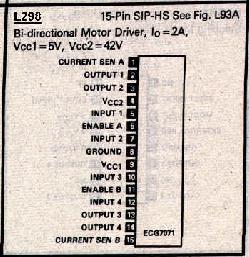 |
The L298 is
another popular bipolar chip consisting of 2 H-Bridges and the supporting control logic.
It is available in several case styles:
L298N vertical
L298HN horizontal
L298P surface mount
All versions are rated 2 amps per channel at 42 volts maximum.
Prices range from $10.15 at MCM Electronics to $2.56 at NetBuy. |
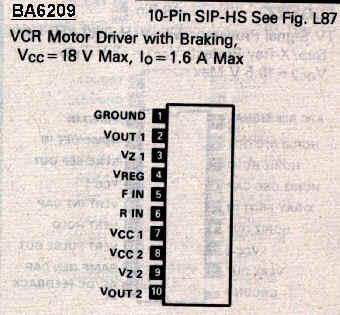 |
The BA6209 has
been used extensively in VCR's over the last 10 years for control of the loading and reel
motors. It is a single bipolar bridge with control logic and speed control. Due to it's
popularity in consumer electronics, it is both easy to find and cheap. It can be found
almost anywhere for under $2.00. Rated 1.6 amps at 18 volts it is both easy to use and
reliable.
|
The following bridge by National Semiconductor is kind of a strange
animal so I list it in a category by itself. The LMD18200T includes bipolar, CMOS, and
DMOS power devices on the same monolithic structure. It has an internal "charge
pump" to raise the internal control voltages of the chip so that it will operate from
TTL and CMOS inputs. It delivers up to 3 amps continous at up to 55 volts. Single quanity
pricing can run $24.00.
 |
National has a
new improved version of the 18200T called the LMD18245T. This device comes in a 15 pin
TO-220 style case and is rated 3 amps continous and 6 amps peak current at supply voltages
up to 55 volts. In addition to a lower price than it's predecessor, it also contains an
innovative current sensing method that eliminates the power loss associated with a sense
resistor in series with the motor. A 4-bit digital-to-analog converter, (DAC), provides a
digital signal path for controlling the motor current, and, by extension, simplifies
implementation of full, half and microstep stepper motor drives. For higher resolution
applications, an external DAC can be used.
|
The next group of devices are MOSFETS.
 |
The TC4427A
MOSFET driver is just one in a series by TelCom Semiconductor Inc. www.telcom-semi.com
It is rated 1.5 amps peak at 18 volts and comes in a variety of packages including 8 pin
minidip and surface mount. The series comes in ratings up to 9 amps peak. |
Apex Microtechnology Corporation specializes in power IC's and their SA series should be
of special interest to the hobbyiest building large robots.
This series comes in an isolated 8 pin TO-3 case and contains all the circuitry needed for
full control of a DC motor.
The SA50 is rated 5 amps continous at up to 80 volts and has internal PWM. Single quanity
pricing on the SA50 from Apex is $142.50.
The SA51 has the same specs as the SA50 but without the internal PWM.
The SA60 is rated 10 amps continous at up to 80 volts and has internal / programmable PWM
frequency generation. Single quanity pricing on the SA60 from Apex is $134.95.
All 3 devices provide outstanding versatility and an efficiency of 97%
You can check them out at: www.apexmicrotech.com
or www.teamapex.com/.
 |
The next
bridge, the LB1630, is an 8 pin minidip and is found in the Robbie Jr. robot by Tomy.
While I have not been able to find the exact specifications on this device, I have
successfully made use of it in my own robots. While I do not know the maximum ratings, I
do know that powering a 12 volt 500ma motor does not even make it warm. Based on this
single fact, I'm assuming it's a MOSFET bridge. |
I'm going to wind up this section with a smorgasbord of circuits and information I hope
you will find useful, or at least educational.
MCM Electronics, www.mcmelectronics.com, has a
nice PWM speed control kit for DC motors. It is rated 10 amps maximum at 24 volts and
includes everything but the heatsink. The part number is 28-6316 and it sells for $16.49
in single quanities.
 |
If you use
hobby type RC servos in your design, you might find it useful to be able to operate them
with a stand-alone circuit for design or troubleshooting. If so, then this circuit could
be just what you need. |
This unique circuit comes from, "The Encyclopedia of Electronic Circuits Volume
II", by Rudolf Graf.
I would like to finish up by listing a couple of websites that have proven to be valuable
resources when trying to find documentation on that elusive part.
The Data Bookshelf at: www.crhc.uiuc.edu/~dburke/databookshelf.html
The Chip Directory at: www.hitex.com/chipdir/chipdir.html
National Semiconductor at: www.national.com/catalog/
Questlink at: www.questlink.com
WZ Micro They
carry several of the chips discuss in this article.
I hope I have been able to provide some useful information for folks wanting to build
their own robot. There are hundreds of great resources on the net but I have tried to
fulfill what I see as a void in our hobby. I strive to keep my writing basic enough so the
less experienced will not feel abandoned while still providing enough substance that even
the seasoned pro may find something useful.
Let me know if I'm succeeding by dropping me a line at:
salvage-1@juno.com