|
Voice
Synth and Recognition Brain
Making Wally
vs. DAS-R
|
| |
This area is dedicated to giving you information you need to make
a head and face for your own robotic monster. The head can be an important area as
it can allow our monster to not only hold sensors like a cameras, sonar range finders and
the like but also allows the robot to express its self. Such as giving the robot an
LED readout for a mouth or servo controlled eyebrows to perhaps indicate the robot is in a
sleep mode.
This page will also include info for making a brain via software
and other things that might go in the head of our monster like vision, hearing, voice and
so forth.
One idea for a head is to use something so that the robot can
wear a mask. In fact one idea I tried on my monster was to use a plasma globe as a
head. Over this I put an all black (yet see through) grim reaper mask. And
over that I attached a silver Jason mask, like the ones you find at
Halloween time. The effect was very scary.
|
 |
The plasma globe glowed dimly
through the mask, out the eyes and mouth, which gave quite an intimidating
presence. It looked as if neurons were firing in some sort of brain. I later
decided I wanted to use a camera in the head of my monster so the globe went and the mask
was used at Halloween. This mask even scarred my dog!
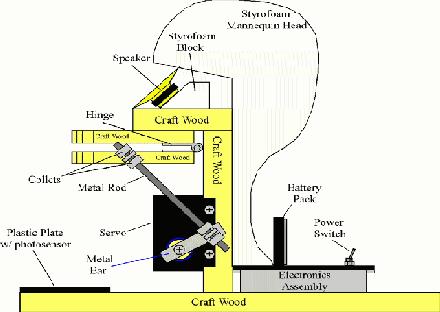
This is a picture of
how you can use a Halloween mask and hardware to make an articulated face. This
diagram is from the Yoda Project website, and by clicking on the picture you can go to the
website for more in-depth details on how to make a Yoda head. From the picture you
can see the main parts are a Styrofoam dummy head, servo, speaker and some wood. Big
thanks go to the great people from the Yoda Project !! |
A take off of the above head is to turn a cheap Styrofoam head
into a Borg head. Some of you might recall the Borg characters on Star Trek The Next
Generation. Below are pictures which so my design progression.
  |
The first head shows a plan and cheap
foam head. You can pick up heads like this at Halloween stores, from beauty shops or
online for $1.69 from this
place. Now you'll have to use your imagination
at this point to envision what a complete Borg head will look like made from a cheap foam
head like this. Cutting the foam is very easy with a utility knife. As you can
see I have added an eye ball sized and shaped camera to my Borg head. It's
black and white and has a built in mic. Not bad for $50.
My complete Borg head will be servo controlled to turn left and
right. I would also like to add servos to tile the head up and down. The tape and
so forth will be gone from the complete project. I also plan to paint the head a
grayish green color to keep with the Borg look. You can not use normal paint on
Styrofoam! You must use latex paint! |

 |
In
the first picture here you can see a microphone amplification
sensor. It's one of those $7 super sonic hearing devices.
The mic has a clip on it. The clip was placed into the head and is
help in place with dry wall putty. I have used dry wall putty to
full in holes and imperfections to the Styrofoam head. It takes a
good couple of days to really dry, but it strengthens the head. So with
the clip mounted I can now remove the mic when I would on the
head.
This last pictures so my B/W camera
which will transmite video to a monitoring station and the new larger
eye is a Color Quick Cam, parallel port version. It was on sale a
while back from ComputerGeeks
for $13. This will be wired to an onboard PC for experiments in
computer vision. The head is now mounted on a plastic project box
and rotates via a standard R/C servo.
The head has been painted in mixture
of black and white latex paint to make gray. Over that I sprayed
normal black and green spray paint to produce Borg like skin
coloration. Once a coat of latex paint is on Styrofoam you are
free to paint it with any sort of paint you want because you will no
longer destroy the foam. |
|
Another great head project on the net is the $600 Maxamilian
android head from HowToAndriod.com It's "A website dedicated to showing others how to build their own
Android robots." It gives you all the info you could need on how to make
a $600 android head with two cameras and Java programming.
|
 |
Yet another option for an interactive
head would be to take a product like the Talking Boris head which you can find around
Halloween time in the US and hack it for your monster robot. The cost of this head
was around $10 at an after Halloween sale! The head
is a skull of course, with red LED's which light up in the eye sockets. The mouth
moves up and down to simulate speak. There is also a speak located under the head.
This Boris has a wired microphone which you can talk into to make
Boris talk. You can also change how your voice sounds by switches located on the
back of the head. You can have a high pitched voice, low pitch, robot voice or
normal pitch.
Most department stores would carry such items as this in the US
around Halloween time. They also make a wireless Talking Boris head. With new
products coming out every year who know what you might find to hack for your monster
robot. |
Wally (my monster) did have a really neat head that was covered
in smooth aluminum sheet metal and a hole for a camera lenses in the middle. This
made Wally look like a Cyclops droid. The head also rotated via a servo and had
really neat antennas coming out of the top of the head for transmission of video data to a
monitor. However, this head has since been removed and Wally is on hold for a
different sort of monster robot platform I am working on which will use the Borg head as
mentioned earlier.
| |
|
 |
This is and animatronic head which is on
my robot named Ity Bity. It's a kit I bought from the robotstore.com.
Cost was about $198. It includes everything you need to build this servo
controlled head. It also comes with a animation controller card which allows you to
record movements of the head as well as up to 16 seconds of digital sound. The
controller will run from a 12 volt battery and has a port for interfacing to a motion
sensor or other controls for activation of the pre-recorded movements of the head. The board is controlled by an included Basic Stamp II. |
|
The head is really awesome to play around with and it's a great
way to give your robot a way to communicate or interact with other people. For more
advanced controls you'd have to create your own programs with the Basic Stamp II or use a
micro with more memory storage space. This kit comes with four servos which control
the eyes moving from left to right. The mouth opening and closing. The head
tilting up and down to make a nodding motion and a rotation servo for the neck to turn
the head left and right.
The hardware of the head would be VERY simple to make on your
own, if you have good wood working and mechanical skills, which I did not at the
time. I'm very
happy with the purchase of the kit, if you were to buy all the parts to build this head
yourself you'd only end up saving about $50 and you'd not have the software which comes
with the controller board making it SO easy to create complex animation movements of the
face that are actually in sync with the voice. |
Voice
Synth and Recognition:
If you are going to use a laptop or another type of PC you might
be just as well off to use software in the computer for voice synthesizer and recognition.
However, if you are going to use embedded controllers or a PC set up that does not
allow for all the extras then for voice synth I would recommend the V8600, it runs about $150 and they say it can
work with almost any microprocessor bus, serial, or printer port! Of course hacking
a toy with one of those new digital voice recorder chips might work just as well if your
robot is only going to say one or two things. Pre-recording a message on a cassette
would work too if you want to hack your walkman.
If you want do experiment with voice recognition and are a good
programmer used to working with VC++, VB++ or VJ++ then you might want to download
Microsoft's Speech Application
Programming Interface (SAPI).
For voice recognition you could buy a kit from the Image
Company that sells for $140 assembled. It can handle 40 user programmed words
and comes complete with a keypad. Or you could by the popular Voice Direct speech rocgnition kit.
This unit can work stand along while handeling about 8 voice commands or you can
interface it to a computer or micro controller to recognize about 60 spoken
commands! This unit is very small and only costs $60 from The
Robot Store. Many roboteers out there are currently experimenting with
these units and expanded the knowledge base about them. I have two of
these units myself. They are easy to set up and do a great job of
recognizing work, however they do not have a good hearing range. So far
they seem to work best with some sort of walkie talkie type transmitter for
voice commands.
METHODS FOR MAKING A BRAIN:
Well you can making a brain with an electronics neural net....BLAH
BLAH BLAH...Artificial Intelligence....BLAH BLAH BLAH....when computers are able to
processes more information than all the humans in the world will...BLAH BLAH BLAH.....android
design is becoming more affordable...BLAH BLAH BLAH. Ever
been to a
website or read information in a book on robotic brains or Artificial Intelligence that
sounded like that? Well it sounds that way to someone not in the loop of scholarly
endeavors. If you read enough of these books and throw yourself into research you
can understand just as much or more on the subject than professors at MIT. I don't
want the Frank N. Stein site to go over board with heady stuff. We are going to try
to show you how to use simple tricks to make your robot smart.
WALLY's BRAIN:
When it comes to brains I refer the movie Frankenstein as I
ghoulishly search the internet at night looking for an ABY NORMAL brain that I can steal.
That's not exactly true, for my monster I am mixing some ideas from here there and
yonder. I am mostly sticking to Kevin's AI theory.
You might find your monster's mind in a mix with other works and ideas or other
people's code. My advice is to borrow and use free code as examples, take parts you
like and think are cool and create the rest...then make a website and tell everyone about
it...that way the cycle of robot life continues.
For myself I have a funny idea I have been refining for a while
now. I call it "Back Pack Intelligence". The idea here is to get my
monster to look smart with it's network of smaller processors, like Basic Stamp II's.
These processors will handle individual problems of control. There will be a
processor for the main drive, one for the arms, one for the head and so forth. Each
almost making a unique robot in themselves. The idea is for the network to
take care of straight forward control, i.e. I tell the robot to go to the kitchen and
maybe the processor for hearing the head will tell the processor for the drive to move to
the kitchen.
The backpack comes in with the addition of a laptop PC. The
PC would control things like voice recognition and camera vision or what ever is really to
much for a embedded processor like a Stamp to handle. It will also be linked to the
network of micros so it can send and receive info from each. It will be a backpack
brain to the network. It will have a program to store actions and information from
the network. It will ask it's self why it was sent to the kitchen? should I go to
the kitchen on my own, what did I do in the kitchen? and from that the program will look
for pattern in data. It will then issue commands to the network as it learns
more.
The advantage I see from this backpack is it allows you to get
your robot up and running with the embedded processors and allows you to create systems
one at a time. After all you are learning at the same time, so why make things hard
on yourself. This method is somewhat advanced, networking things is no easy
task. My backpacking will allow me to have straight forward control, while playing
around with AI that does not have to work at first, and so does not affect the monster
functions very much.
This is not really a new idea. Using co-processor with a PC
is very common in advanced homebrew creations. It's just that no one else is doing
it this way. So my monster brain will be one of a kind. I think backpacking
would be a very good idea for anyone who has worked with Stamps or other smaller processor
on robots and is looking to make something bigger.
Wally
vs. DAS-R:
Wally was my old computer controlled robot who had
an unfortunate accident down a flight of stairs. Wally has sort of
died, sad to say. However, Wally is lucky because he's a robot and
I'm bringing him back as DAS-R. DAS-R stands for Defensive, Artificially
intelligent, Security-Robot. DAS-R will be incorporating a whole
new designs philosophy of design to create robots for military
applications. DAS-R will be armored to an extent to prevent damage
from falls, collisions and weapons such as baseball bats. DAS-R's
weapons will include a club for hitting back, a stun gun, a laser tag
gun for simulation of gun fights and a small cutting saw for cutting
through chains and locks.
The smaller things I develop for DAS-R
or in the process of working on DAS-R I will share here with everyone on
the net, as I have been up to this point. However, some of things
I might start leaving out because I'd like to turn DAS-R into a
marketable robot in the future. This is something I take
seriously, although the humor used through out this site might suggest
otherwise.
Some might ask, WHY make an armed military
robotic solder? To answer that I point to the resent conflicts in
Bosnia and Kosovo. The United States military forces in
conjunction with the United Nations feel obligated to police certain
regional conflicts that do or could conceivably interfere with our
greater notational security concerns, the security of our allies and or
the protection of basic human rights. In our current social
and political structure it is not desirable to lose human lives in the
process of helping other countries resolve their conflicts. In
most cases that means sending in inadequate force numbers into combat
situations which are changing minute by minute, such as in Bosnia.
Or it results in hold back ground forces while waging an air war, such
as in Kosovo.
In Kosovo small numbers of enemy
forces were able to effectively drive out a largely unarmed and defenseless
population of ethnic Albanians. The Albanians were run out
because they had no army to protect them. While air strikes were
causing damage to enemy military infrastructure and economy, the real
threat to the ethnic Albanians were the solders running them out.
Those solders were not largely hurt because it's hard to bomb small
groups of people hiding in builds and forests with fast moving
jets. The result were countless innocent people forcefully made to
leave their homes and country. They were allowed to return
after the air war was over and enemy forces left the Kosovo region.
But what I ask is could it have been
done better? If ground forces had been sent into the Kosovo
conflict they would have assuredly suffered casualties and perhaps would
have caused a stalemate or even a prolonged and expanded war. But
imagine for a moment it were possible to air drop platoons of robot
solders. Each platoon would be comprised of about 20 robots.
Each robot would have a rugged drive system, much like a 4X4 personal
ATV's. In fact that is what my DAS-R will eventually use for a
drive train.
Robots could run on a combination of
gasoline/battery/solar power. Each robot would have a fully
function arm to pick weapons up off the ground or to open gates and
doors. Robots would also have a gun type arm and tear gas launcher.
Robots would be linked to a mobile remote command center for command
instructions. Robots would have counter threat A.I. to automatically
carry out preprogrammed maneuvers. Target destination and lethal
force reaction commands would be issued only by human controllers.
When you break it down DAS-R would be a smart mobile gun station in many
ways.
The benefit of DAS-R systems
would be in having a truly expendable expeditionary force. In
Kosovo platoons of robots could have covered open areas, creating a line
to which enemy forces could not progress un-harassed. Platoons
could have formed firing squads which could support one another with
weapons fire. A defensive posture such as this would have forced
the enemy to come out of hiding in large numbers to counter such a
threat if enemy forces wished to proceed with the forced removal of the
ethnic Albanians. Once the enemy forces were out in the open
standard air craft could have been employed to destroy enemy
targets. This is a small part of my vision for DAS-R. This
is why I am currently working to create such a weapon system, so that
one day The United States military might have a new tool to fight wars
with. A tool that could save lives. This is what I want to
create and this is what all my robotics work and projects will be in the
pursuit of from this point forward.
|